Слияние кода завершено, страница обновится автоматически

Назад | Вперед | Содержание
Переносное обучение

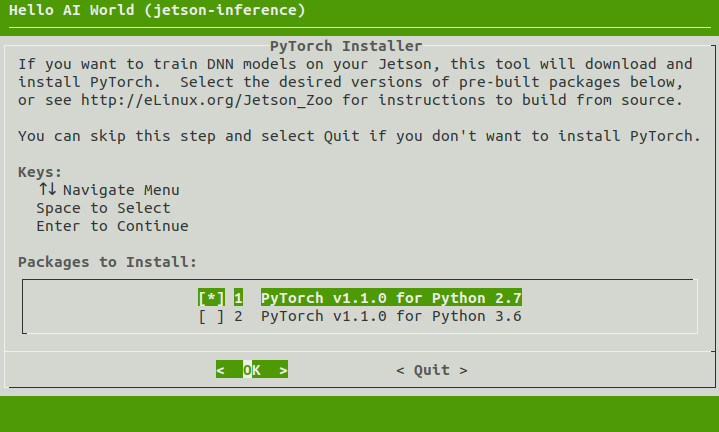 > **Примечание**: автоматический инструмент установки PyTorch требует JetPack 4.2 или более новой версии. Если вы хотите выполнить [обучение модели детекции объектов](pytorch-ssd.md), вам следует использовать JetPack 4.4 или более новую версию и установить PyTorch для **Python 3.6**.
> **Примечание**: автоматический инструмент установки PyTorch требует JetPack 4.2 или более новой версии. Если вы хотите выполнить [обучение модели детекции объектов](pytorch-ssd.md), вам следует использовать JetPack 4.4 или более новую версию и установить PyTorch для **Python 3.6**.
Для проверки правильности установки PyTorch и обнаружения вашей GPU выполните следующие команды из интерактивной оболочки Python - запустите python или python3 из терминала:
>>> import torch
>>> print(torch.__version__)
>>> print('CUDA доступен: ' + str(torch.cuda.is_available()))
>>> a = torch.cuda.FloatTensor(2).zero_()
>>> print('Тензор a = ' + str(a))
>>> b = torch.randn(2).cuda()
>>> print('Тензор b = ' + str(b))
>>> c = a + b
>>> print('Тензор c = ' + str(c))
>>> import torchvision
>>> print(torchvision.__version__)
Обратите внимание, что версия torch должна быть отображена как 1.6.0, а версия torchvision должна быть 0.7.0.
Выполните следующие команды на вашем Jetson (за пределами контейнера) для отключения ZRAM и создания файла swap:
sudo systemctl disable nvzramconfig
sudo fallocate -l bk 4G /mnt/4GB.swap
sudo mkswap /mnt/4GB.swap
sudo swapon /mnt/4GB.swap
Затем добавьте следующую строку в конец файла /etc/fstab, чтобы сделать изменения постоянными:
/mnt/4GB.swap none swap sw 0 0
Теперь ваш файл swap будет автоматически смонтирован после перезагрузки. Для проверки использования выполните команды swapon -s или tegrastats. Отключение ZRAM (внутреннего сжатого пространства swap) также освобождает физическую память и требует перезагрузки для вступления в силу.
Если вы испытываете нехватку памяти во время обучения, вы можете попробовать временно отключить графический интерфейс пользователя Ubuntu во время обучения. Это освободит дополнительную память, используемую менеджером окон и рабочим столом (около ~800 МБ для Unity/GNOME или ~250 МБ для LXDE). Вы можете временно отключить рабочий стол, выполнить команды в консоли, а затем перезапустить рабочий стол после завершения обучения:
$ sudo init 3 # остановить рабочий стол
# войти в консоль от имени пользователя
# выполнить скрипты обучения PyTorch
Исправления:
Если вы хотите сделать это постоянным при перезагрузке, вы можете использовать следующие команды для изменения поведения при запуске:
``` bash
$ sudo systemctl set-default multi-user.target # отключить рабочий стол при запуске
$ sudo systemctl set-default graphical.target # включить рабочий стол при запуске
После перезагрузки рабочий стол останется отключенным или включенным (в зависимости от того, какой параметр вы установили). ## Повторная настройка наборов данных для обучения Ниже приведены пошаговые инструкции по повторной настройке моделей на примерных наборах данных с использованием переносного обучения, а также по сбору собственных данных для создания собственных настраиваемых моделей:
Кошки/Собаки | 800МБ | 2 | 5 000 | ~7-8 минут | ~4 часа |
| Классификация | PlantCLEF | 1,5ГБ | 20 | 10 475 | ~15 минут | ~8 часов |
| Обнаружение | Фрукты | 2ГБ | 8 | 6 375 | ~15 минут | ~8 часов |
* Приблизительное время для одного полного прохода обучения по набору данных с использованием Jetson NanoДалее | Повторная настройка на наборе данных кошек/собак
Назад | Монокулярная глубина с использованием DepthNet
© OnClickListener 2016-2019 NVIDIA | Содержание
Вы можете оставить комментарий после Вход в систему
Неприемлемый контент может быть отображен здесь и не будет показан на странице. Вы можете проверить и изменить его с помощью соответствующей функции редактирования.
Если вы подтверждаете, что содержание не содержит непристойной лексики/перенаправления на рекламу/насилия/вульгарной порнографии/нарушений/пиратства/ложного/незначительного или незаконного контента, связанного с национальными законами и предписаниями, вы можете нажать «Отправить» для подачи апелляции, и мы обработаем ее как можно скорее.
Опубликовать ( 0 )